# 系統展示
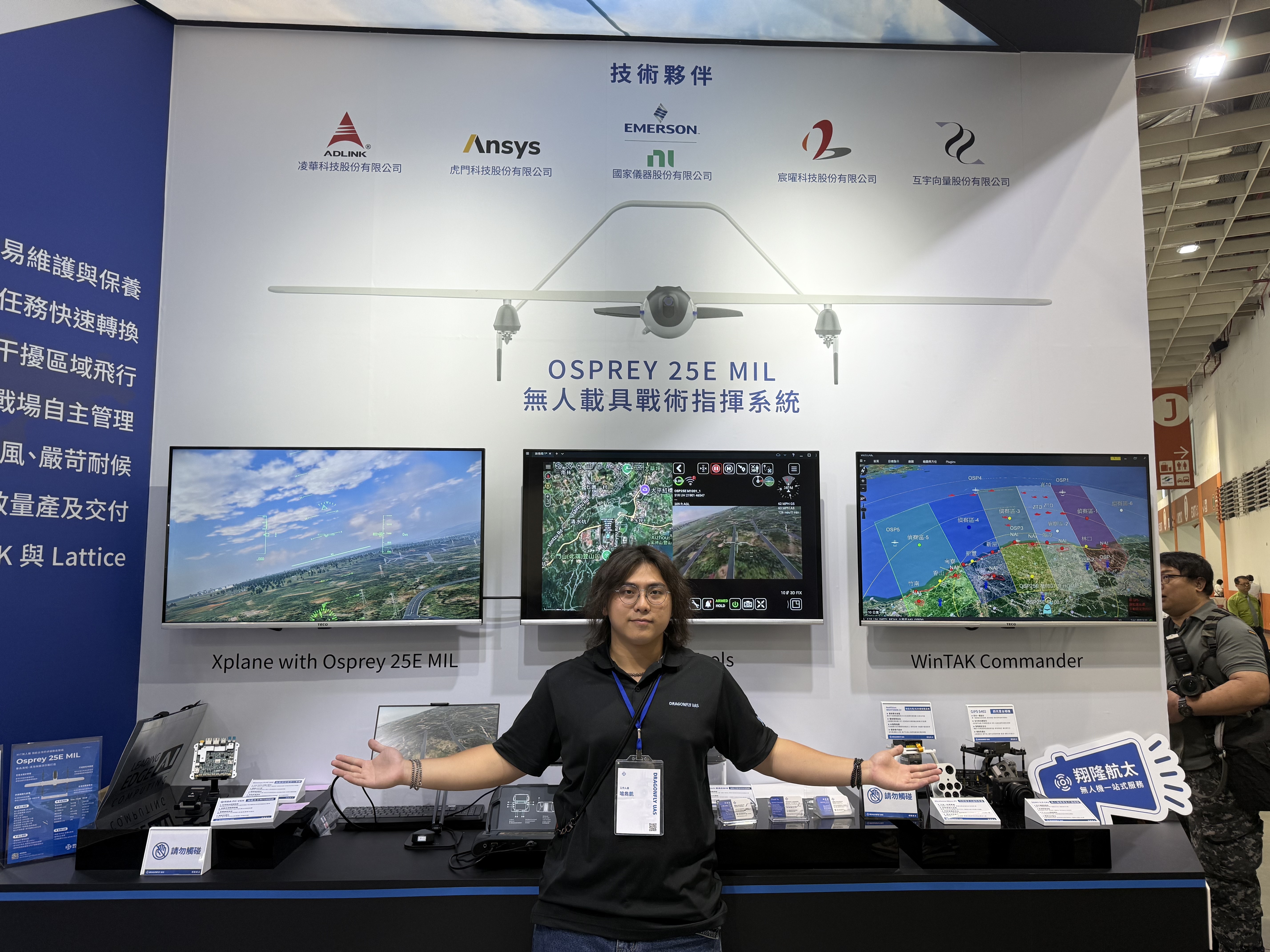
整合展示:X-Plane with OSPREY 25E MIL 模擬環境、ATAK 行動端、WinTAK 系統端
# 合作夥伴

# 專案概述
負責與具20年軍事背景的旅級參謀長合作,定義出實際軍方的需求與應用場景,並將這些需求轉化為技術規格與系統架構,實作到下述的整合工作中, 最終將實際軍事情境需求轉化為可展示、可驗證、可擴充的整體解決方案。
負責 VTOL OSPREY 25E MIL自研無人機專案的飛行控制軟體與地面站系統整合工作,並擔任與 Qisda(佳世達)協作時的主要技術聯絡人,協調雙方技術團隊分工與介接方式,並主導整體軟體架構規劃。
專案中成功運用佳世達的 Android 無人機控制器,完成軍規 TAK/ATAK 平台的介接與模擬環境測試。
同時於 TADTE 台北國際航太暨國防工業展 中,負責對外呈現任務平台架構與各項整合成果。
# 我在這個專案做了什麼?
在這個專案中,我主導了整套 TAK 系統的架構規劃與整合工作,包括:
- 系統架構設計:規劃整體整合方案,讓無人機能與 TAK 生態系統無縫對接
- TAK 全平台整合:負責 ATAK(Android)、WinTAK(Windows)以及 TAK Server 的部署與串接
- 與佳世達對接:協調雙方技術團隊,將 OSPREY 25E MIL 無人機整合到佳世達的 Android 控制器上
- 展覽現場 Demo:確保系統在航太展現場穩定運作,成功完成展示
# 技術架構
這次整合的核心挑戰是讓不同平台的 TAK 系統能夠協同運作:
TAK 系統建置:
- TAK Server:作為整個系統的核心,負責資料同步與分發
- ATAK(Android TAK):運行在佳世達的 Android 控制器上,接收無人機資訊與影像,及控制飛機
- WinTAK(Windows TAK):提供更完整的指揮監控介面
無人機整合:
- OSPREY 25E MIL:垂直起降(VTOL)固定翼無人機,兼具旋翼機的靈活性與固定翼的續航力
- 透過 CoT(Cursor on Target)協定,將無人機的位置、狀態、影像等資訊即時傳送到 TAK 系統
# 關於 TADTE 台北航太展
台北航太暨國防工業展(TADTE)是台灣最重要的航太國防展覽,能在這個場合展示我們的整合方案,對團隊來說是很大的肯定。
現場展示時,我們成功驗證了:
- 無人機與 TAK 系統的即時資料同步
- 跨平台(Android / Windows)的協同運作
- 整套解決方案的實際可行性
# ATAK 系統展示
ATAK 實際系統展示錄影
# 航太展覽現場
TADTE 台北國際航太暨國防工業展 現場展示
# 小結
這個專案讓我對 TAK 生態系統有了更深入的理解,也累積了與硬體廠商合作的經驗。從系統架構規劃到現場 Demo,整個過程雖然壓力不小,但看到成果順利展出的那一刻,一切都值得了。
# 專案背景

消防署舉辦「複雜地形攜帶型無人機補助儀式」,消防署署長蕭煥章表示,臺灣地形複雜,在多山、河川湍急等惡劣環境下,導致搜救艱難且具高度風險,消防署採購 44 組複雜地形攜帶型無人機及 22 套搜救影像管理系統,分配給全國 22 個縣市消防機關,希望藉由 AI 科技導入,擴大山域、水域等複雜地形的搜救量能,並提升搜救效率與搜救人員的安全。
# 前言
這次很榮幸能參與內政部消防署的「AI 智慧搜救派遣系統建置中程計畫」,這是一個結合 AI 科技與搜救任務的大型專案,目標是讓搜救人員能在第一時間掌握現場狀況,朝向「零傷亡搜救」的目標邁進。
這個專案我們與三商電腦合作,搭配 Skydio X10 無人機的即時影像串流,最終部署到全國 44 台軍規 Windows 平板上,供前線搜救隊使用。

# 我在這個專案做了什麼
與內政部消防署及系統整合商進行技術討論&規格釐訂,在專案前期進行可行性驗證(PoC),協助業務製作專案簡報,並協助與消防局第一線人員的Demo、以及審核合約文件。技術上主導整個系統的端到端整合,將無人機拍到的畫面,能夠即時、穩定地出現在搜救人員手上的平板電腦裡,
主要負責的項目包括:
- 系統架構規劃:從需求分析到技術選型,規劃整體系統架構
- 無人機影像/資料整合:實作 Skydio X10 無人機的 RTSP 即時影像&資料串流到 TAK/Media Server
- 平板端部署:將整套方案部署到 44 台 軍規 Windows 平板
- 跨團隊協調:與三商電腦團隊協作,確保系統整合順利進行
# 現場整測與部署驗證

實際到新北市政府消防局無人機訓練場,與三商電腦進行整測並驗證無人機影像串流至平板的功能
# 最大的溝通挑戰
這個專案最具挑戰性的部分,如何確保各單位間的協調與整合,最終讓整個系統順利運作。
因為作為影像與資料第一手資訊的接收站,如何設計轉發的介接層,讓後續的系統能穩定接收並處理這些資料,同時又能滿足此案所要求的商業需求,並且 TAK 系統原本主要運行在 Linux 平台上,要讓它在 Windows 環境下穩定運作,同時還要接收無人機的即時影像與資料串流,並提供系統整合商介接,這中間有很多要處理:
- 環境限制:軍規平板的硬體規格和一般電腦不同,要在有限的資源下確保系統流暢運作
- 影像串流延遲:搜救現場分秒必爭,RTSP 串流的延遲必須控制在可接受範圍內
- 穩定性要求:這是要用在真實搜救任務的系統,不能有閃退或當機的情況
# 系統架構

# 三系統整合展示

指揮中心平板與遙控器串流與 AI 辨識整合畫面
# 串流 AI 辨識細部

即時串流 AI 辨識系統細部畫面
# 成果展示
# 相關新聞報導
這個專案也獲得了媒體的關注,以下是一些相關報導:
- 導入 AI 科技強化搜救量能 消防署補助複雜地形攜帶型無人機 - 經濟日報
- 消防署複雜地形攜帶型無人機補助儀式 導入AI科技強化搜救量能 - 蕃薯藤新聞
- 翔隆航太展示Skydio X10 AI智慧搜救無人機 - 經濟日報
# 小結
能參與這樣一個有意義的專案,真的很有成就感。看到自己規劃和實作的系統,真的被搜救人員拿去用在實際任務上,那種感覺十分具有成就感。
聲明:本文所有影像與內容皆不涉及任何機敏資料,僅呈現公開可展示之工作紀錄。
# 專案概述
與海巡署合作完成 ATAK 與 WinTAK 戰術系統的整合規劃,負責制定無人機資訊、影像接入 TAK 生態系的技術規格及客製化專屬於海岸巡防的功能。
並提出完整符合美軍現役標準的 TAK 系統部署方案,協助海巡署建立可應用於海岸巡防任務的即時態勢感知能力,提升海上與沿岸行動效率。
# ATAK 串接及 RTSP 影像

ATAK 行動端串接無人機 RTSP 即時影像串流
# 戰情中心同步顯示
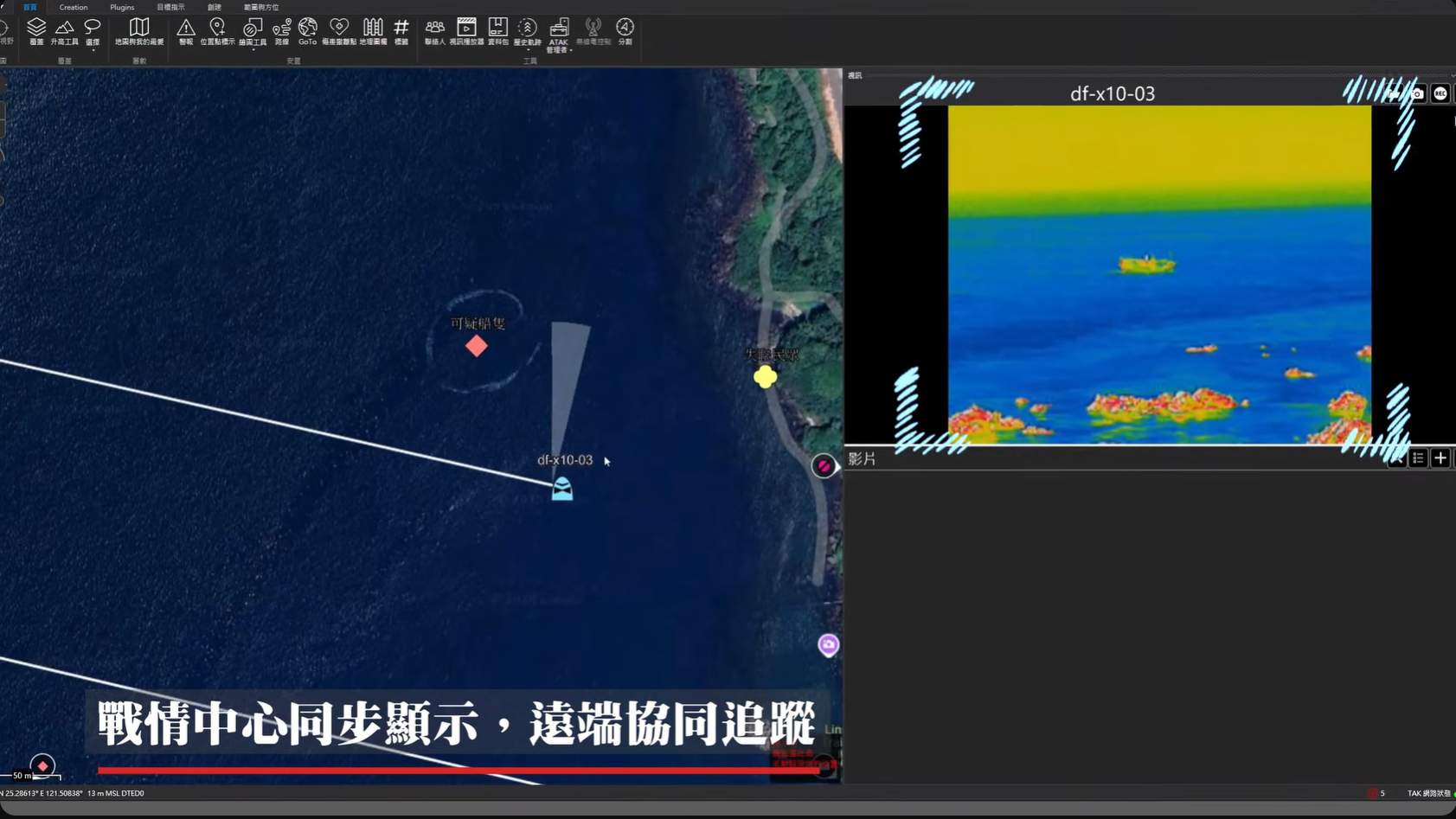
戰情中心大螢幕同步顯示 TAK 系統即時態勢
# 我在這個專案做了什麼?
在業務現場與海巡署進行技術討論,釐清海岸巡防情境下的即時影像、定位與態勢感知需求,並制定完整的技術規格與系統整合方案,主要負責的項目包括:
- 客製化功能開發:為海巡署需求評估並開發專屬功能模組,AIS(臺灣海域船舶動態資訊系統)整合
- 技術規格制定:定義無人機資訊與影像接入 TAK 生態系的完整技術規格
- 系統整合規劃:規劃 ATAK(Android)與 WinTAK(Windows)的整合架構
- 部署方案設計:提出符合美軍現役標準的 TAK 系統部署方案
- RTSP 影像串流:實作無人機即時影像串流至 TAK 系統的技術方案
# 技術架構
TAK 系統架構:
- TAK 客製化模組:整合海巡署專屬需求功能,AIS 資訊接入,提升海上態勢感知
- TAK Server:作為核心伺服器,負責資料同步與分發
- ATAK(Android TAK):供外勤人員使用的行動端應用
- WinTAK(Windows TAK):戰情中心使用的指揮監控介面
影像整合:
- 透過 RTSP 協定將無人機即時影像串流至 TAK 系統
- 支援多端同步顯示,戰情中心與外勤人員可同時監看
# 成果展示
海巡署 TAK 戰術系統整合展示
# 小結
這個專案讓海巡署具備了符合國際標準的即時態勢感知能力,透過 TAK 系統的整合,前線巡防人員與戰情中心能夠即時共享無人機影像與位置資訊,大幅提升海岸巡防任務的協同作戰效率。
# 專案背景
負責設計並實現 Skydio X10 無人機與法務部調查局監控系統的串接流程
將無人機空中蒐證影像接入其既有監控平台,強化調查勤務監控效率與蒐證精確度
# 工作內容
- 規劃 Skydio X10 無人機影像串流架構
- 設計與既有監控系統的整合介面
- 實現即時影像串流與資料回傳機制
- 現場設備整合與系統驗收
# 驗收階段

驗收階段於客戶現場整合翔隆設備
聲明:本文所有影像與內容皆不涉及任何機敏資料,僅呈現公開可展示之工作紀錄。
# 專案背景
將 Skydio X10 無人機的 MISB 影像成功整合到 ESRI ArcGIS Pro 的 FMV(Full Motion Video)功能。
這項任務包含硬體、韌體、影像標準、GIS 平台與前端系統等多項技術挑戰。
我負責從頭到尾主導整合流程,從原廠溝通、規格確認、問題排除到最終 Demo 的交付,打造一個能在客戶現場即時展示的完整 FMV 解決方案。
# 一、了解需求:確保無人機影像能被 ArcGIS Pro 讀取
ArcGIS Pro 的 FMV 模組,需要影片中含有符合 MISB 標準的 metadata(包含 GPS、方位角、飛行姿態等資訊)。
因此整合的核心問題在於:
Skydio X10 的影像與遙測是否能以 MISB 規格輸出,並被 ArcGIS Pro 正常解析?
# 二、與原廠協作:確認 X10/X10D 的 MISB 支援能力
Skydio 的影像串流與遙測機制原先主要設計於軍用版本 X10D,因此我必須先確認:
- X10 是否也能輸出包含 MISB metadata 的影片?
- RTP/RTSP 串流是否能正常被第三方平台解析?
- metadata field 是否符合 ArcGIS Pro 的標準?
我參考了 Skydio 提供的開發文件,其中記載:
即時指令與控制(RAS-A)
- 支援第三方控制器,可進行航點、模式切換等高階控制
雙向遙測與感測器資料
- 電池資訊
- GPS
- 姿態
- 飛行參數
- RTP/RTSP 影片串流
透過與原廠的反覆溝通,我確認 MISB 功能可以啟用,且 X10 具備 ArcGIS FMV 所需的輸出能力。
# 三、硬體刷機與相容性測試:影像與 metadata 的同步驗證
在獲得原廠確認後,我進行:
- 無人機硬體準備與檢查
- 韌體刷寫與版本更新
- RTP/RTSP 串流測試
- MISB metadata 解碼驗證
- ArcGIS Pro 播放測試
ArcGIS Pro 需要 MISB metadata 才能同步顯示影像位置:
使用示範檔案進行初步驗證
在這個階段,我排除了無人機韌體與第三方平台的相容性問題,讓 ArcGIS 能穩定解析 metadata 與影像。
# 四、為客戶打造線上 Demo:自行開發 FMV 檢視平台
ArcGIS Pro 很強大,但對於業務來說:
- 不方便攜帶到客戶現場
- 授權限制、安裝時間長
- 初次操作不容易理解
為了讓 FMV 的價值能更快被理解,我額外自主開發了一套線上 FMV Viewer,只需開瀏覽器即可使用。
# 線上 FMV 檢視平台展示
線上 Demo 網站: https://fmv.visionone.com.tw
# FMV 平台功能
功能包含:
- MISB metadata 解析
- 地圖與影像同步播放
- 即開即用、無需安裝
- 業務能直接在客戶現場展示
這大幅提升了 FMV 技術在客戶面前的溝通效率。
# 五、整體整合流程
最後,我將整個流程整理為一套「可交付方案」,讓業務與客戶都能快速理解:
- 確認硬體能力
- 確認軟體/MISB 相容性
- 與原廠協作並開啟功能
- 無人機韌體更新與串流驗證
- ArcGIS Pro FMV 實測
- 開發線上 Demo,加速業務展示
- 交付完整軟硬體整合方案
這樣的流程確保從技術端到業務端都能順利落地。
# 結語
在這個整合專案中,我負責從需求拆解、原廠協作、技術測試到 Demo 開發的完整流程。
透過跨平台整合,我成功讓 Skydio X10 的 MISB 影像能被 ArcGIS Pro FMV 正確解析,並打造能在客戶現場立即展示的線上平台。
聲明:本文所有影像與內容皆不涉及任何機敏資料,僅呈現公開可展示之工作紀錄。
# 專案概述
完成 Skydio X10 無人機與台中市航港局「航港一號」船艦內部監視系統的整合驗證,使無人機影像能在船艦平台即時呈現。
透過空中巡檢影像的即時回傳與記錄,大幅提升離岸風電巡檢任務的效率與資料完整性。
# 登船作業

登上「航港一號」船艦進行整合驗證作業
# 無人機熱顯像回傳
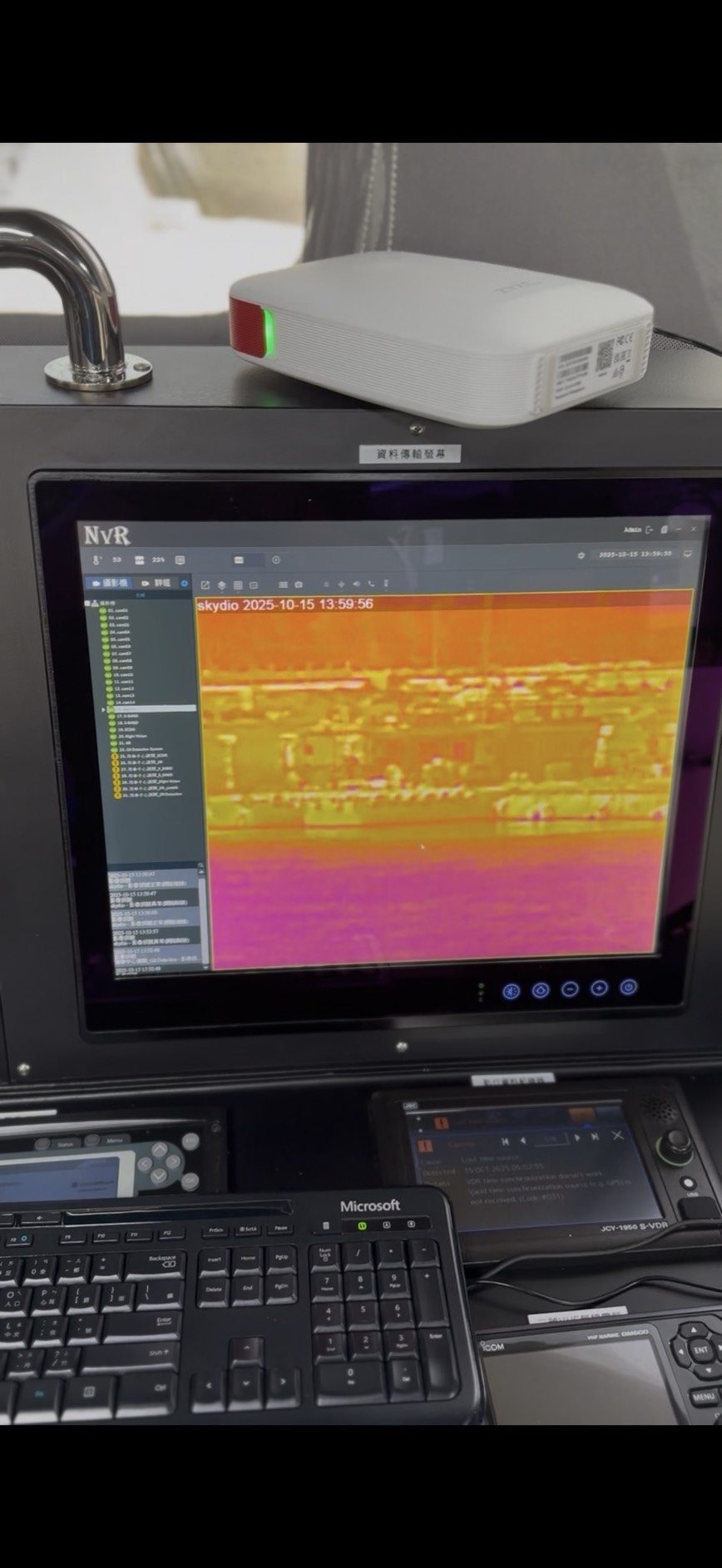
Skydio X10 熱顯像影像即時回傳至船艦座艙監視系統
# 現場作業

Skydio X10 無人機現場操作準備
# 我在這個專案做了什麼?
- 影像串流整合:將 Skydio X10 無人機影像串流至船艦內部監視系統
- 熱顯像回傳:實作熱顯像鏡頭影像的即時回傳功能
- 系統驗證:完成船艦環境下的整合驗證測試
- 離岸風電應用:驗證無人機於離岸風電巡檢任務的可行性
# 技術亮點
Skydio X10 無人機:
- 具備 AI 自主避障能力
- 支援可見光與熱顯像雙鏡頭
- 適合複雜環境下的巡檢任務
船艦整合:
- 無人機影像即時回傳至船艦座艙
- 支援多螢幕同步顯示
- 可記錄巡檢影像供後續分析
# 小結
這次與航港局的合作,成功驗證了無人機與船艦監視系統整合的可行性。透過 Skydio X10 的熱顯像功能,能夠有效進行離岸風電設施的巡檢作業,即時影像回傳至座艙讓船上人員能夠同步掌握空中視角,大幅提升海上巡檢任務的效率與安全性。
聲明:本文所有影像與內容皆不涉及任何機敏資料,僅呈現公開可展示之工作紀錄。